| Dijkstra 路径规划算法原理详解及 Python 代码实现 | 您所在的位置:网站首页 › Python算法图解 源代码 › Dijkstra 路径规划算法原理详解及 Python 代码实现 |
Dijkstra 路径规划算法原理详解及 Python 代码实现
|
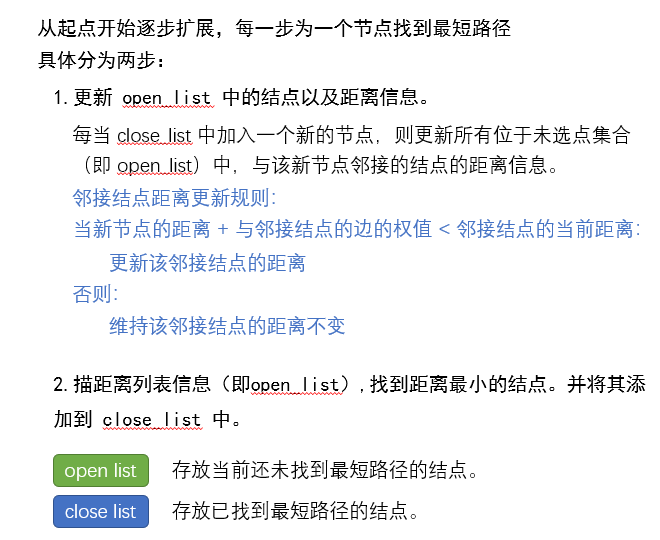
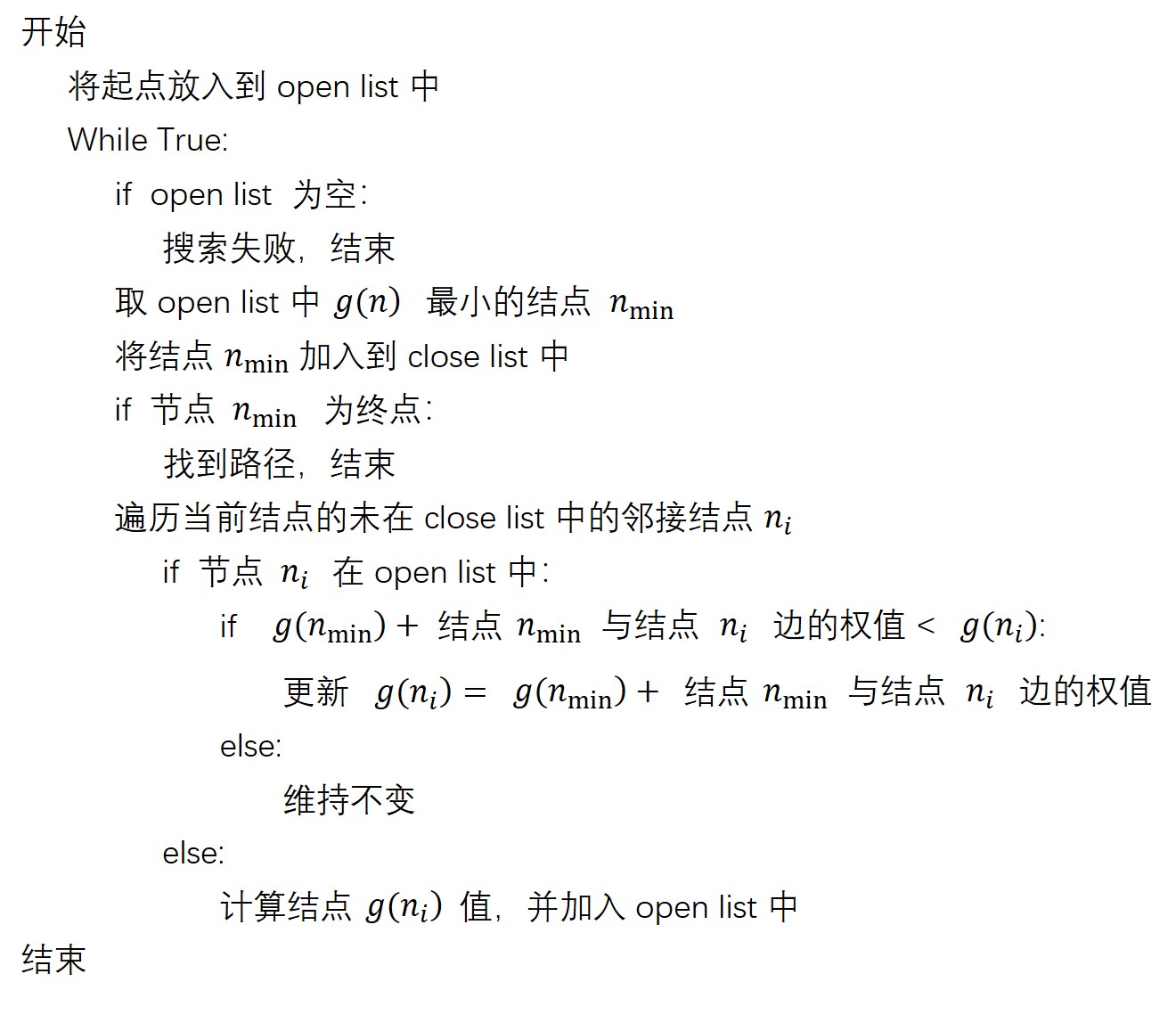
荷兰数学家 E.W.Dijkstra 于 1959 年提出了 Dijkstra 算法,它是一种适用于 非负权值 网络的 单源最短路径算法,同时也是目前求解最短路径问题的理论上最完备、应用最广的经典算法。它可以给出从指定节点到图中其他节点的最短路径,以及任意两点的最短路径。 Dijkstra 算法是一种基于 贪心策略 的最短路径算法,该种算法的原理是按照路径长度逐点增长的方法构造一棵路径树,从而得出从该树的根节点(即指定节点)到其他所有节点的最短路径。 Dijkstra 算法的 核心思想 是:设置两个点的集合 S 和 T。集合 S 中存放已找到最短路径的节点,集合 T 中存放当前还未找到最短路径的节点。 具体实现过程如下图所示:
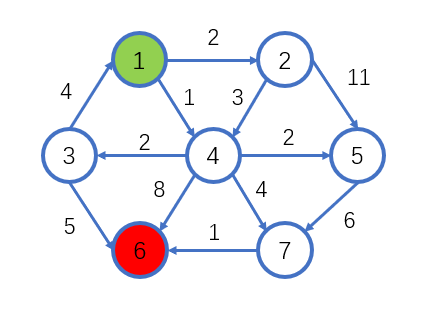
下面将用一个示例来讲述算法的原理过程。 如图所示,一个有向权值图,利用 Dijkstra算法 找到从 节点1 到 节点 6 的最短路径。
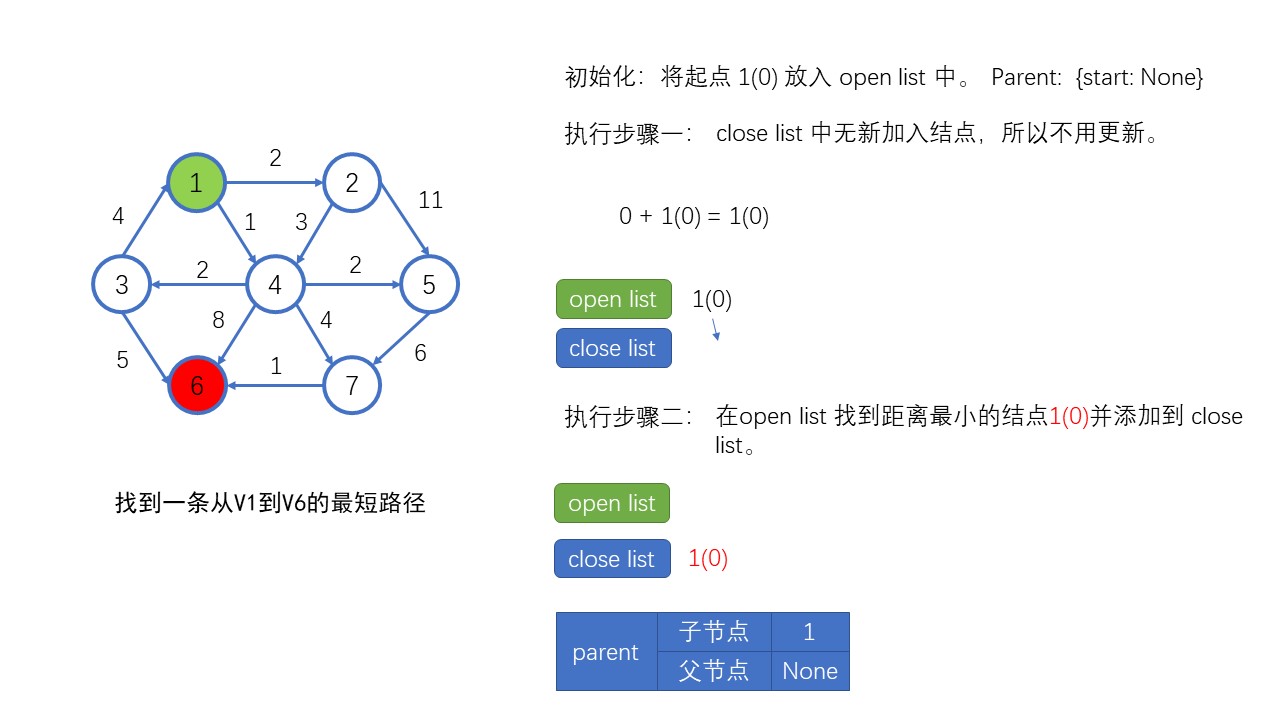
首先进行初始化,初始化一个空的 open list、close list 以及 parent。将起点及其距离信息放入到 open list 中,将起点及其父亲节点放入 parent 中,由于其是起点,所以设置其父节点为 None。 open list 中存放那些已经访问的从该节点到起点有路径的结点(有路径但不一定是最优路径)。 close list 中存放那些已经找到最优路径的结点。 parent 存放结点的父子关系,方便后面路径回溯。 注意: 其实 open list 中应该存放所有未找到最短路径的结点,存放时由于要设置其距起点的距离,初始化时通常设置为+Inf.后面逐个访问结点时到再更新其相应的距离值。其实和现在的做法是一样的,将 open list 初始化为 空,逐个访问到结点时再往里添加或者更新。两者皆可。
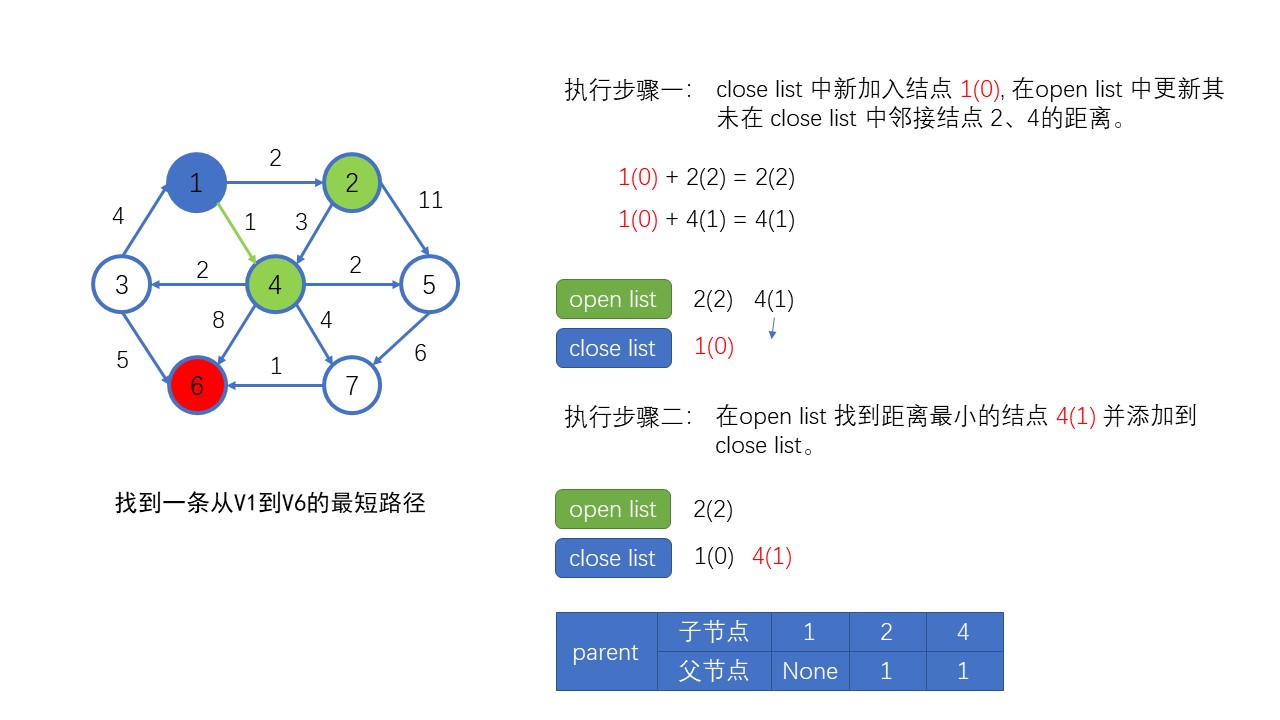
按步骤执行。 close list 中新加入的结点为 1(0), 遍历其邻接结点 2 、4,两结点均未在 close list 中,所以计算其距离(即到起点的距离)如下图所示,并将其添加如 open list 中。将结点 2 、4的继承关系即 {2: 1,4: 1}添加进 parent 中。从 open list 中 找到距离最小的结点,即 4(1),并添加到 close list 中。
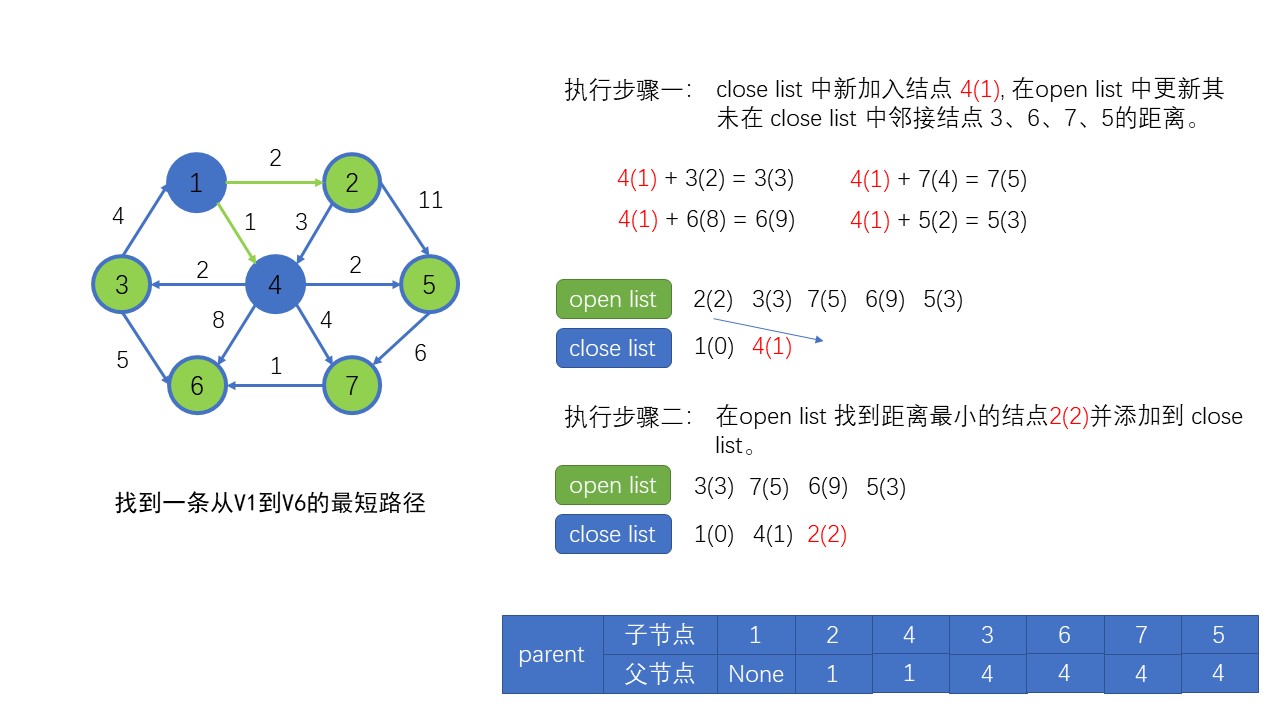
按步骤执行。 close list 中新加入的结点为 4(1), 遍历其邻接结点 3、 6、 7、 5,四个结点均未在 close list 中,所以计算其距离(即到起点的距离),如下图所示。并将其添加如 open list 中。将结点 3、 6、 7、 5的继承关系即 {3: 4, 6: 4, 7: 4,5: 4}添加进 parent 中。从 open list 中 找到距离最小的结点,即 2(2),并添加到 close list 中。
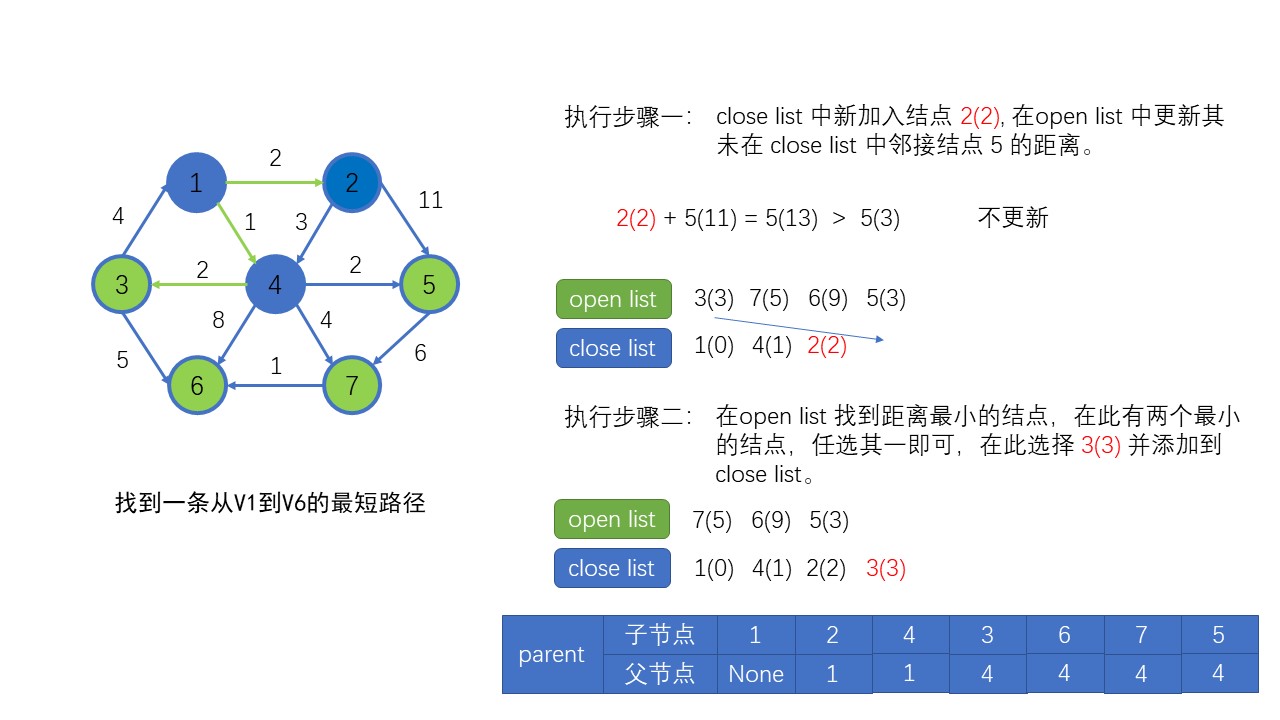
按步骤执行。 close list 中新加入的结点为 2(2), 遍历其邻接结点 4、 5,由于结点 4 已经在 close list 中,所以只需计算 结点5的距离,如下图所示,由于计算的新的距离为13,大于open list 中结点 5 原来的距离 3,所以不进行更新。同时也不更新 parent 中结点 5 的继承关系从 open list 中 找到距离最小的结点,此时有两个距离最小的结点,3(3) 和 5(3), 任选其一即可,在此选 3(3), 并添加到 close list 中。
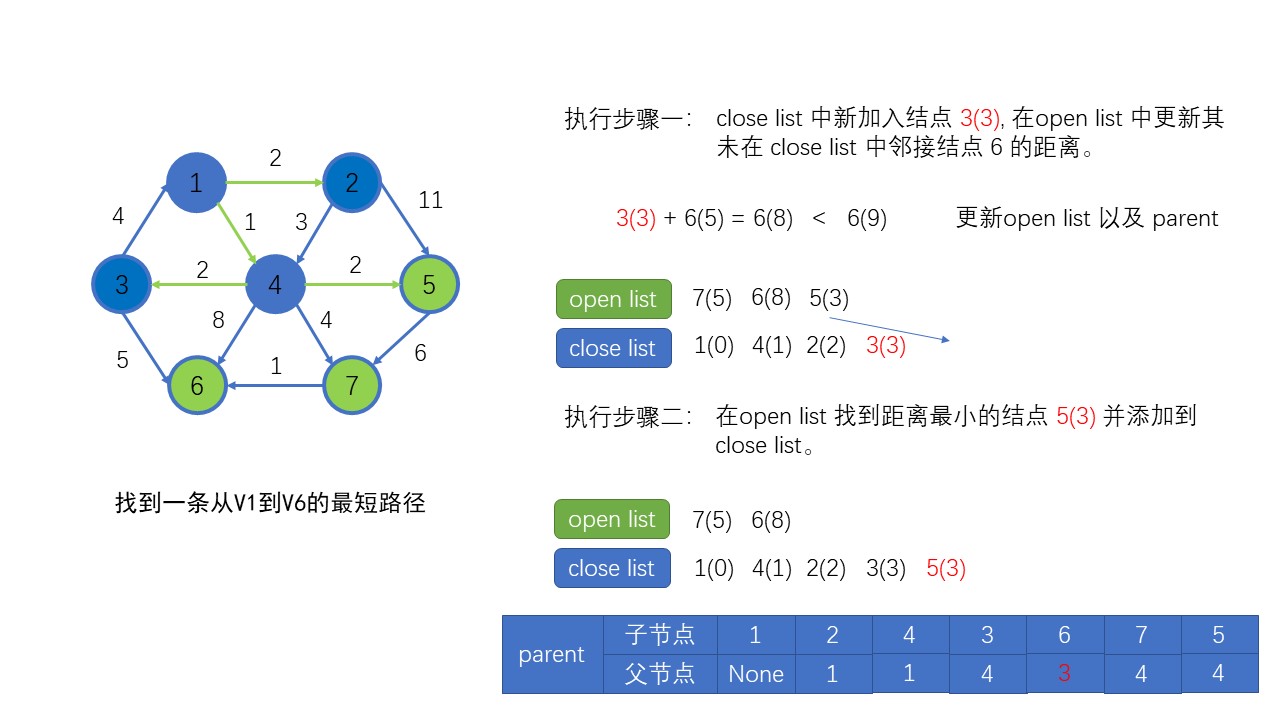
按步骤执行。 close list 中新加入的结点为 3(3), 遍历其邻接结点 1、 6,由于结点 1 已经在 close list,所以不用考虑,只需计算 结点 6 的距离,如下图所示,计算后得到的距离为 8, 小于 open list 中结点6 原来的距离 9,所以更新 open list 中结点 6 的距离为 8. 同时更新 parent 中结点 6 的继承关系为 {6: 3}从 open list 中 找到距离最小的结点,即 5(3),并添加到 close list 中。
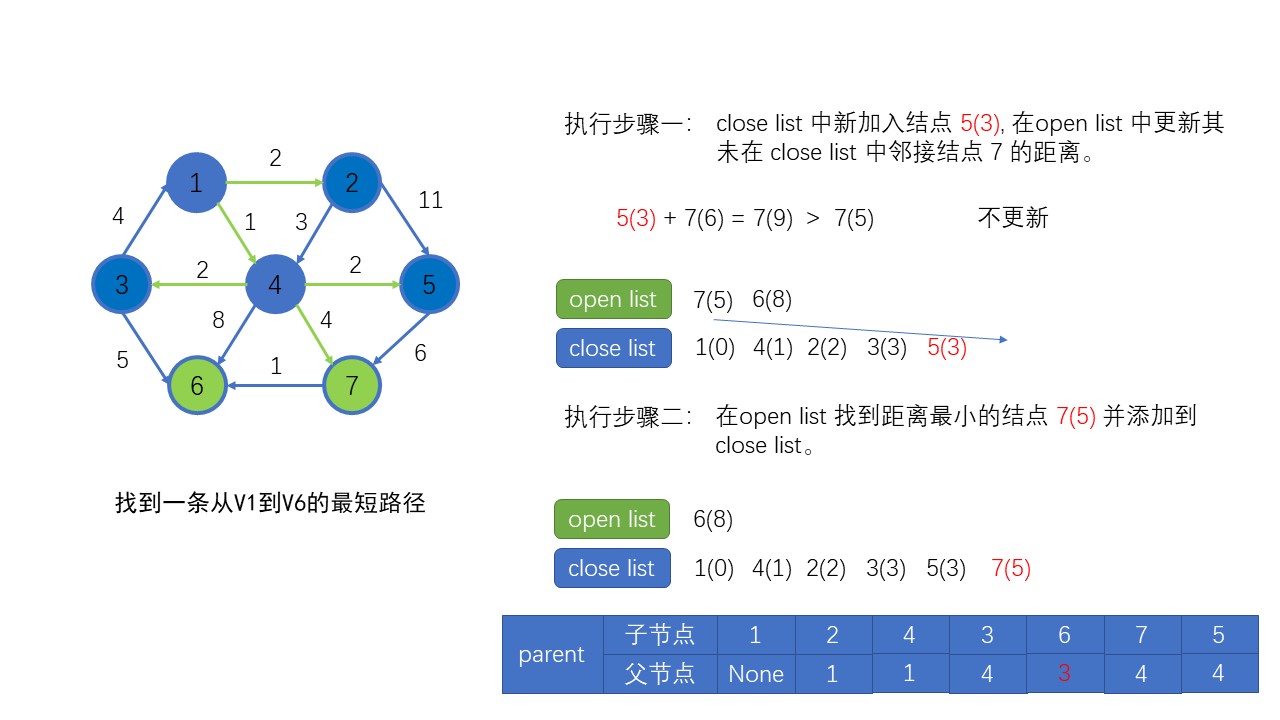
按步骤执行。 close list 中新加入的结点为 5(3), 遍历其邻接结点 7,结点 7 未在close list 中,计算其距离,如下图所示,计算后的距离为 9,大于 open list 中 结点 7 的距离 5,所以不进行更新。同时也不更新 parent 中结点 7 的继承关系。从 open list 中 找到距离最小的结点,即 7(5),并添加到 close list 中。
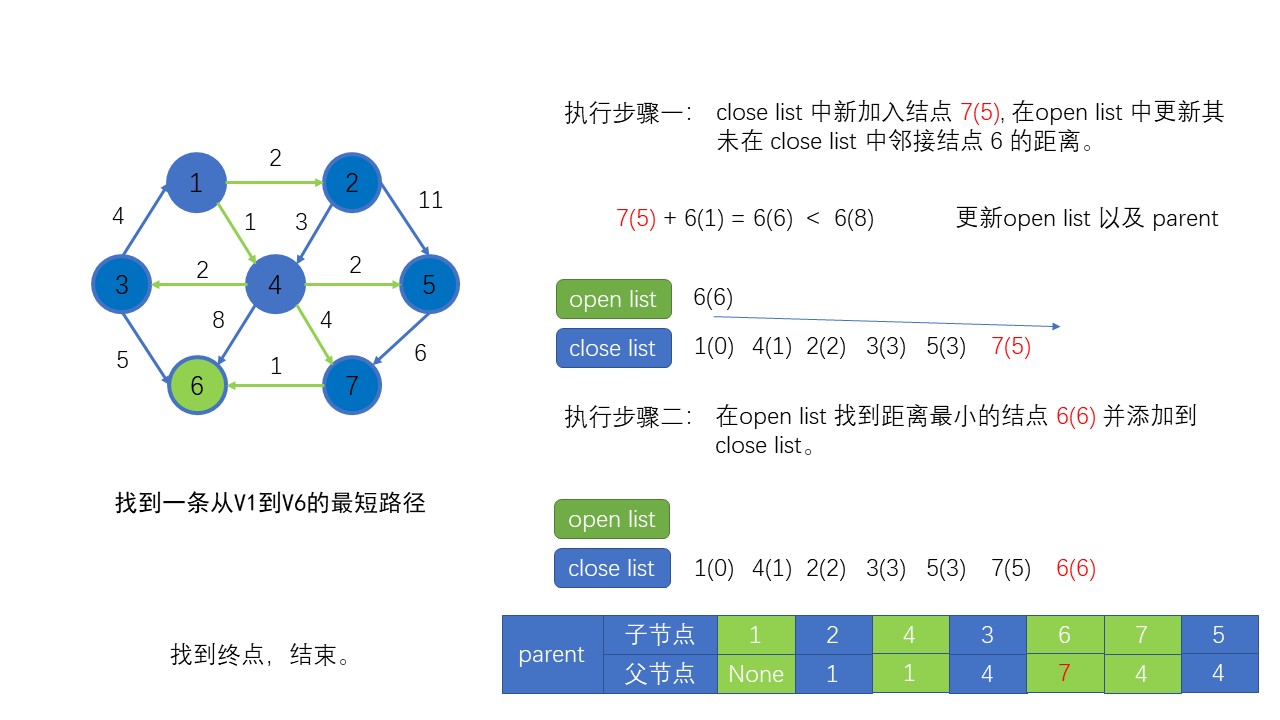
按步骤执行。 close list 中新加入的结点为 7(5), 遍历其邻接结点 6. 结点 6 未在 close list 中,所以计算其距离,如下图所示。计算后的距离为 6,小于 open list 中 结点 6 的距离 8,所以将 open list 中结点 6 的距离更新为 6.同时更新 parent 中结点 6 的继承关系为 {6:7}从 open list 中 找到距离最小的结点,即 6(6),并添加到 close list 中。至此,找到终点。
路径回溯。 根据 parent 中的继承关系,从终点向起点回溯,得到从起点 1 到 终点 6 的最短路径为:1 => 4 => 7 => 6, 最短路径长为:6. 总结上述流程,可以得到以下算法代码框架:
运行结果:
|
 如果对您有帮助,记得在下面点赞呦!如果有问题也欢迎在下面评论区留言。
如果对您有帮助,记得在下面点赞呦!如果有问题也欢迎在下面评论区留言。【本文地址】